| |
|
| |
 |
 |
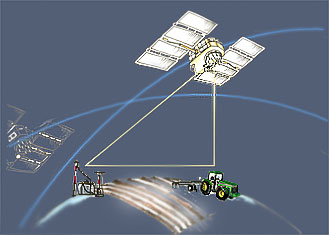
"If they don’t agree," says Rekow, "it knows how to adjust itself so that next time, it will make a better prediction." If all this seems a little futuristic, it is. Farmers can’t buy fully automated tractors just yet. But they can move one step closer to hands-off plowing. Two companies currently sell GPS equipment that farmers can install into existing tractors. IntegriNautics, of Menlo Park, CA, was founded in 1994 by several Stanford students, including Mike O’Connor. The company had begun by selling the airplane-landing systems, and when O’Connor graduated from Stanford in 1998, he brought the tractor project to the company. The other company, Beeline, is based in Australia and has been selling its tractor kit there since 1997. It will begin marketing to American farmers in fall 2000. O’Connor calls the autotractor system "a potentially money-saving step for farmers." Beeline’s John Hill agrees, saying, "It lowers per acre input cost and improves yields. … It will return the value of the investment in six to twelve months." Both companies sell a similar kit, consisting of a base station, which stays at the barn, a processor and touch-screen for inside the tractor’s cab, and a set of antennae that bolt to the top of the tractor. Beeline’s kit also features a gyroscope for measuring the tilt of the tractor. The gyroscope allows the controller to compensate for swaying due to the sloshing of fluids in the tractor’s sprayer tank.The processor tucks in beside the driver’s seat, and the touch-screen mounts to the right of the steering wheel. The driver chooses instructions in English or Spanish, then selects his site from a menu set up by the farmer. Once the tractor has pinpointed its starting position, it prompts the driver to "Begin Autosteer." The driver touches the onscreen button and the tractor takes control, lining up the first row and plowing away. When the tractor reaches the end of a row, he must turn it around manually. Simply by taking the wheel, the driver regains control. Using an onscreen map, the driver lines up the next row as best he can. When he pushes the autosteer button again, the tractor adjusts itself to the exact starting position of the next row and resumes plowing, perfectly straight. The tractor will continue counting off rows until the driver decides the field is finished and drives back to the barn. The autotractor controls only the steering; the human driver controls the throttle. Unlike city driving, there is no cycle of braking and accelerating, only "forward," "reverse," and "stop." The tractor cruises along at a constant speed until the driver decides the day’s work is done. Although the tractor is capable of making the U-turn by itself, some situations require a human’s judgment. Suppose a highway runs along the edge of the field. If traffic is heavy, the driver must decide when it is safe to pull out. The tractor doesn’t know any better than to blaze into traffic. "Most customers don’t really want us to do the turns," says engineer Tom Bell of IntegriNautics. "A human being is still the best sensor. If there’s a cow in the way, or a drunk sleeping it off on the side of the field – God forbid we build a driverless system and it kills someone." Perhaps a completely driverless system is pretty fanciful, after all. But robotics research in other fields, such as obstacle avoidance, could compensate for the tractor’s weaknesses. Although Stanford is the only place where GPS is being used for automatic control, a robotics team at Carnegie Mellon University in Pittsburgh, for instance, are also working with John Deere to build a better tractor. IntegriNautics is loaning their system to willing farmers who try it and provide feedback. Overall, O’Connor says, farmers are enthusiastic. "They’re actually almost bragging to the neighbors about it," he says. "Anything that increases productivity, they like." He tells the story of one test farmer who plowed his highway-side field with his marker arms sticking straight up. When the neighbors came over to find out why he wasn’t marking his rows, he showed off his new gadget. Another farmer took his autotractor to a neighbor’s almond orchard. Beds for planting trees must be 22 feet apart – not 30 inches, as with smaller crops. At that distance, marker arms are useless. To visibly mark where to plow, each row is flagged by white sandbags – a time-consuming and boring job, costing the farmer about $5 an acre, O’Connor says. To the neighbor’s amazement, the farmer with the autotractor plowed more than 200 acres of almond fields without a single bag. Yet farmers are a conservative bunch. They must balance their costs against the crops’ selling price. "If they start running wild experiments on their cost side," says Parkinson, "they’ll go broke." Beeline hasn’t set its U.S. price yet, but the IntegriNautics kit retails at just under $50,000. "I don’t think it’s an exorbitant price for what it does," says Albert Lockwood, a potato farmer in Idaho. “The vehicle and implement are a $200,000 machine. If you can get a little more productivity out of it...” he shrugs. “It seems like these high-tech things are necessary to compete.” But Lockwood has 6,000 acres and 14 tractors. His farm has doubled in size in the past year. Some smaller farmers aren’t sure they can afford the initial capital investment. "There’s not a lot of money to be made in farming," says Jack Chapman, who farms 1,000 acres in Merced, CA. "If you only have 1,000 acres, you’re not going to spend $48,000." Other farmers feel the system isn’t truly useful yet. "If it’s foggy, [then] it’s rainy and it’s wet and you’re not going to be in the field that much," says Anthony Stegall, who grows cantaloupe in Mendota, CA. "Let me know when you can run five tractors from a joystick in your office." Still, some farmers think the autotractor is a good idea whose time will come. Danny Cotta, of Tipton, CA, is already using a simpler GPS system to map his 300 acres of corn and wheat for more efficient fertilizing. "For every little ripple, you miss-spray and it costs you money, you miss-seed and it costs you money," he says. "If the right [tractor system] comes along, it would be a very valuable commodity." "We’re all going to be using it eventually," says Dick Reason of Tonopah, NV. Reason grows alfalfa and hay – not big moneymakers. "It’s only a matter of what you’re growing, if you can afford it. It’s like all those technologies," he says. "They’ll get cheaper in a few years." Parkinson predicts that if his team succeeds in making the autotractor "bulletproof," farmers will line up to get in on the action. "I’m being a visionary here," he says, "but I think it’s inevitable. … The economics are there." His eyes twinkle as he tells another story of the expert driver in the dusty Fresno test field. While the research team watched from the sidelines, the driver rode in the autotractor as it plowed several arrow-straight rows. When the tractor swung around to demonstrate a circular pattern, however, it suddenly stopped. The driver got out, crouched behind it for several moments, then hopped back into the cab. The tractor drove on. Oh, no, Parkinson recalls thinking. What’s wrong with the tractor? When the driver returned, Parkinson approached him. "I want to buy one of these right now," the driver said. Dumbstruck, Parkinson explained it was only a prototype, full of delicate computer equipment, and not ready for real farm work. "Why," he asked, "do you want to buy it?" "One
person, three tractors," the driver said simply. He saw Parkinson’s
vision: a single farmer managing a fleet of robotic tractors, rather than
paying drivers to plow the fields. He had stopped to get a better look Parkinson was astonished. " He never even asked me what the price was."
|


 at the perfectly aligned rows.
at the perfectly aligned rows.